The principle of range measuring using ultrasound transducers is well established and presents no major design problems. However when we installed our first system and switched on the power, we had a bit of a surprise.
The principle of range measuring using ultrasound transducers is well established and presents no major design problems. However when we installed our first system and switched on the power, we had a bit of a surprise.
We discovered that not all drivers park exactly between the white lines, or directly under the sensor. In addition we found that people drive all sort of cars with various heights shapes and angles. In fact we concluded that some drivers park their cars in various ways and angles just to confuse the Parking Guidance System. In other words, the detection accuracy was not what we initially expected.
We had to go through a major research effort, during which, we collected data and profiled every possible way of parking and of most possible shapes and angles of car. These profiles were used to construct a set of filters with which we can claim to have close to:
100% detection accuracy.
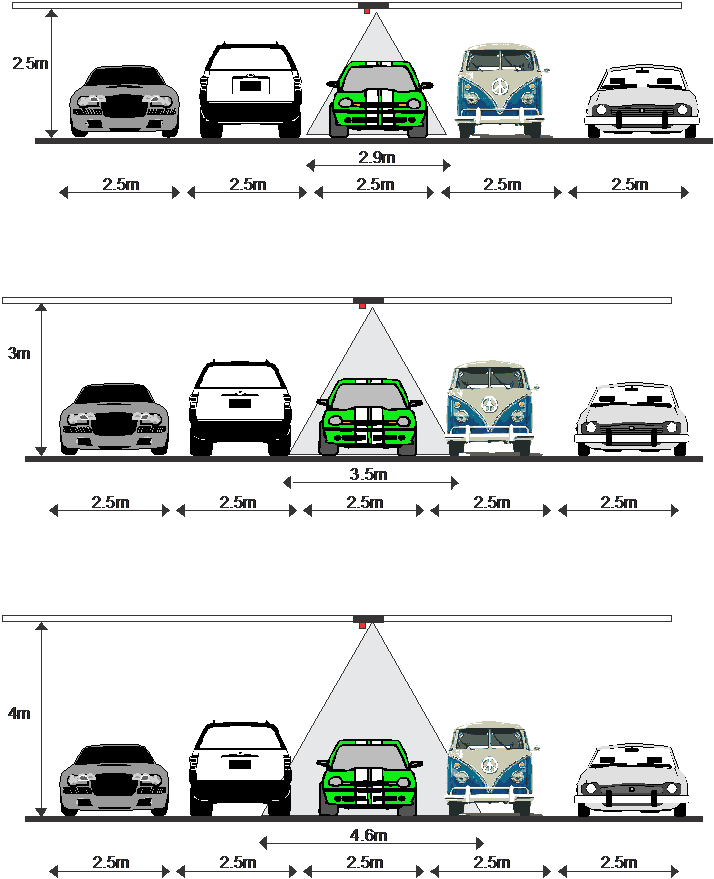
One of the conclusions is that the height of the sensor must not be more than 3m above the ground. Please refer to the drawings on the next page.
This drawing illustrates a typical parking lot with 2.5m space per parking bay and three possible heights. 4m 3m and 2.5m. The gray triangle represents the ultrasonic transducers beam
A typical ultrasound transducer has a sensing angle of 60O or +/- 30O relative to the vertical. Assuming a height of the sensor is 4m then the covered floor area diameter is:
Detection diameter=2 * 4m * Tan(30) = 4.6m
In this case, the sense width is well within the neighboring parking spaces. Even if we limit the detection range, large cars, which park on the white lines of the neighboring bay, may be detected.
We can profile and guarantee that if any car will park exactly under a 4m high sensor between the two lines the PGS sensor will accurately detect it. We can also guarantee that no neighboring car will be detected if it is outside the white lines.
But, if we take into account that the sensor senses outside the –6db angle and that cars come in different heights and shapes and that drivers may infringe on the adjacent parking space we can clearly see that the accuracy of the system may be severely compromised.
In the case of the 3m high-sensor the diameter of the covered floor area is:
Detection diameter=2 * 3m * Tan(30) = 3.5m
Since the detection range is limited to 2m, there is no probability of our system picking up a neighboring vehicle, even if it is parked on the white line.
|
We therefore recommend that in a scenario of ceilings higher than 3m, a suspended system will be installed!! |